معرفی:
کارگاه ســاخت رباتیــک یــک کارگاه 10 روزه بــود کــه در آذر 98 در دانشــگاه تهــران برگــذار شـد. تمرکـز اصلـی ایـن کارگاه بـر روزی طراحـی رایانشـی و همچنیـن سـاخت بـه وسـیله ی ربـات بـود. ایـن کارگاه شـامل 45 دانشـجوی کارشناسـی و کارشناسـی ارشـد رشـته معمـاری بـوده کـه در گـروه هـای پنـج تـا شـش نفـره تقسـیم شـدند تـا بتواننـد بـا ربـات کار کننـد. در این کارگاه ربات 6KR KUKA با کنترلر 2KRC مورد استفاده قرار گرفت.
فرآیند:
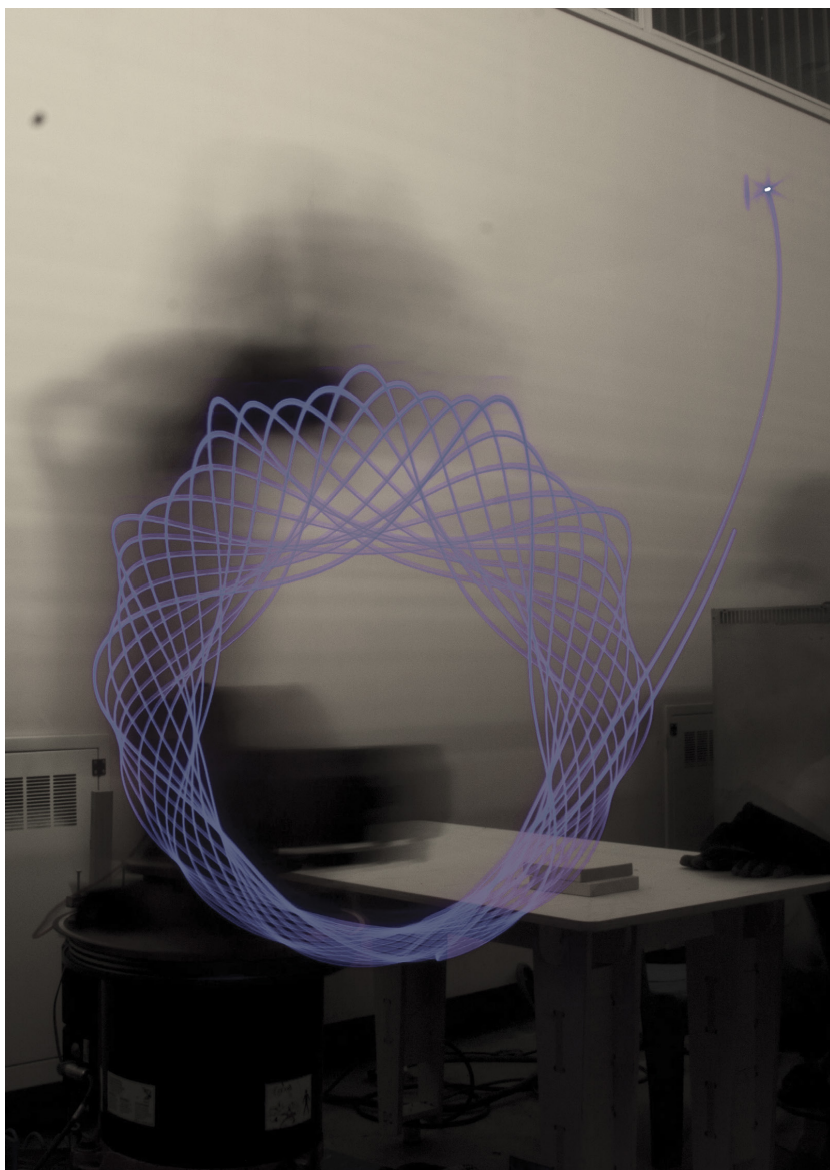
پــس از آمــوزش Syntax KRL در ابتــدای کارگاه و توضیــح در مــورد نحــوه تولیــد Code-G ، دانــش آمــوزان دو دســته تمریــن اصلــی را در گــروه هــای خــود انجــام دادنــد تــا مفهــوم مسـیرهای موجـود در شـبیه سـازی روبـات هـا را در قسـمت اول کارگاه یـاد بگیرنـد. در تمریـن اول از دانشـجویان خواسـته شـد تـا مسـیر حرکـت ربـات را بـا اسـتفاده از خـط هایـی بـه هـم متصــل و پیوســته در نــرم افــزار d3 grasshopper شــبیه ســازی کننــد، و پــس از تولیــد Code-G هـا آن هـا بـه وسـیله ی یـک LED سـاده کـه بـه بـازو ربـات متصـل شـده بـود، مـدل خـود را در فضـای سـه بعـدی پرینـت کردنـد. گـروه هـا code-G هـای مربوطـه را تولیـد کردنـد تـا ربـات از مسـیرهای مشـخص شـده پیـروی کنـد و الگویـی را بـا نـور ایجـاد کنـد. در تمریـن بعـدی ، از هـر گـروه خواسـته شـد تـا بـا اسـتفاده از قطعـات چوبـی در تعـداد و ابعـاد مشــخص، ســاختاری را طراحــی کــرده و آن را بــا تکنیــک Place and Pick مونتــاژ کننــد و اطمینـان حاصـل کننـد کـه ایـن سـازه مـی توانـد پایـداری خـود را بـدون اسـتفاده از چسـب و میـخ در کل مونتـاژ حفـظ کنـد.
محصول نهایی:
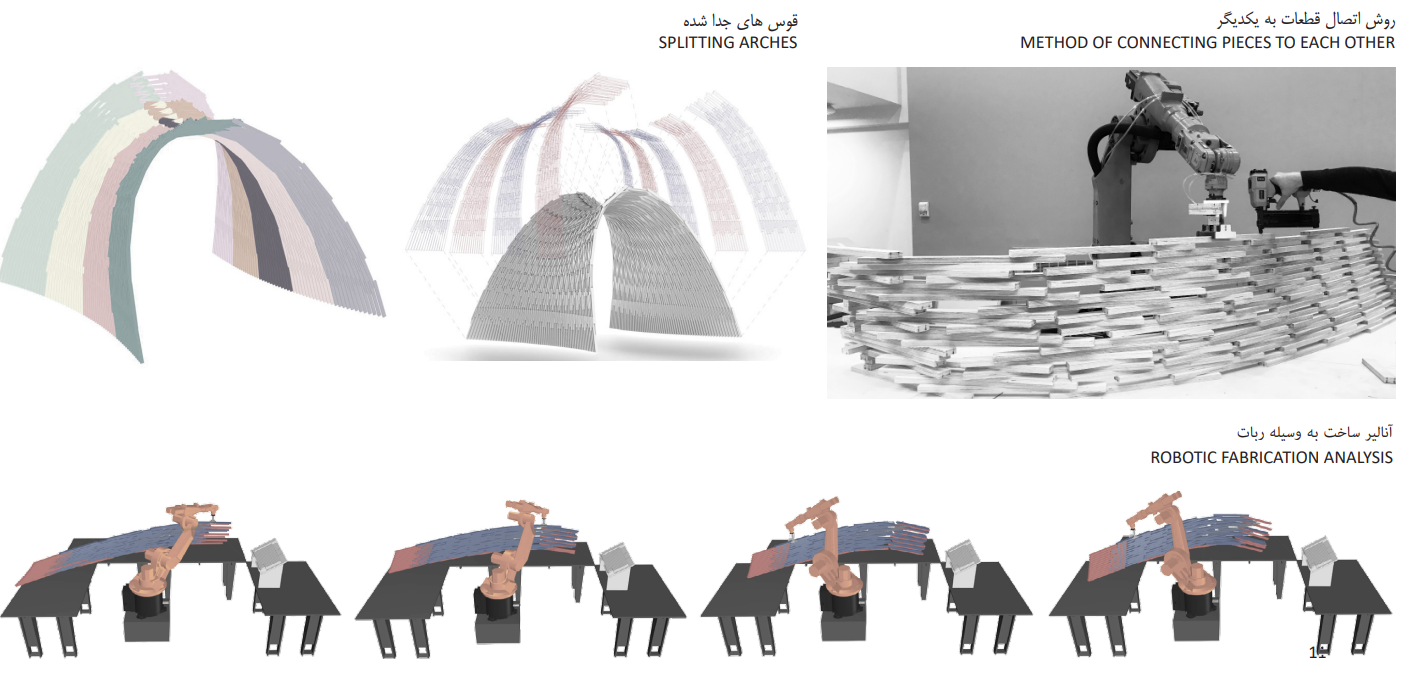
یافتـن فـرم: پـس از انجـام تمریـن مقدماتـی توسـط تیـم هـا و آشـنایی بـا چالـش هـای عملـی ، از جملـه تعریـف صحیـح plane بـرای جلوگیـری از برخـورد بـازوی روبـات بـا محیـط اطـراف آن و نصـب گریپـر پنوماتیـک و پمـپ هـوا ، دانــش آمــوزان اقـدام بـه طراحــی یـک غرفــه در مقیـاس 1:1 نمودنـد. محدودیـت عمـده ای کـه در وجـود داشـت، میـزان متریـال موجـود بـود. بـرای سـاخت سـازه نهایـی، 40 متـر مربـع پـای وود بـه ضخامـت 18 میلـی متـر درنظـر گرفتـه شـده بـود. همـه پیشـنهادات توسـط هیئـت داوران ارزیابـی شـد و در نهایـت یکـی از آنهـا بـا انجـام اصالحاتـی بـرای پـروژه نهایـی انتخـاب شـد.
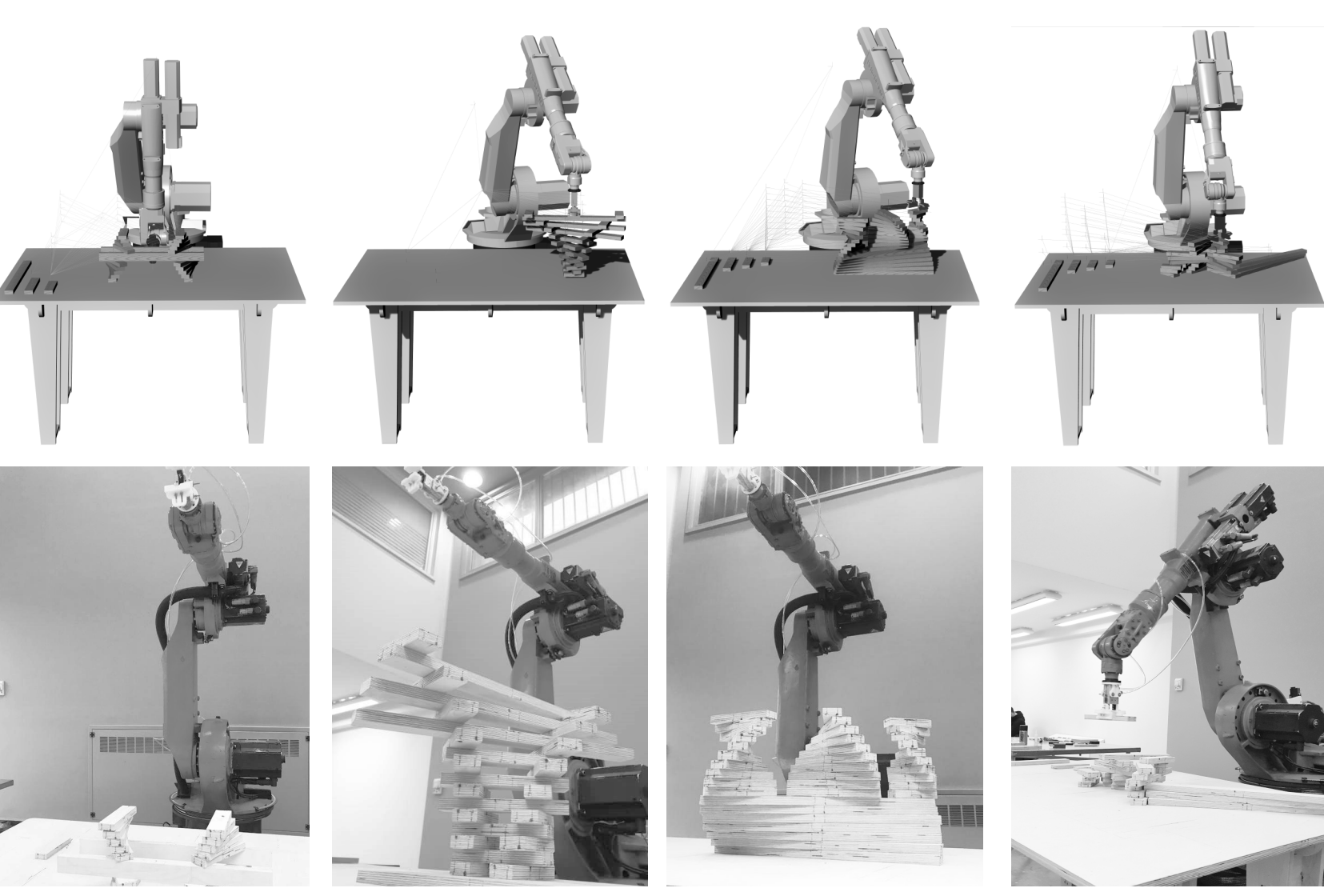
آزمایـش هـای اولیـه بـه وسـیله ربـات: طـرح نهایـی بایـد بـرای سـاخت بـه وسـیله ربـات آمـاده میشـد. بـا توجـه بـه اینکـه ایـن نـوع ربـات نهایتـا بـه محـدوده ای بـا شـعاع 1.6 متـر دسترسـی دارد و شـرایط محـل برپایـی سـازه، تصمیـم گرفتیـم هـر قـوس را بـه دو قسـمت بخـش تقسـیم کردیـم، کـه و 5 تقسـیم کنیـم و همچنیـن بـه ترتیـب هـر قسـمت را بـه 4 قطعـه تشـکیل شـد. دو روش بـرای اتصـال قطعـات چوبی پیشـنهاد درنتیجـه طـرح نهایـی از 9 شــد. روش اول بــا اســتفاده از یــک غلتــک چســبان بــود، بــه ایــن صــورت کــه هــر قطعــه چوبـی توسـط ربـات از روی ایـن غلتـک عبـور کـرده و سـپس در موقعیـت خـود قـرار بگیـرد. روش دوم، تکنیــک ســاخت robotic-human بــود. در ایــن روش انســان و ربــات هــر دو در فراینــد ســاخت دخیــل هســتند و بخشــی از کار بــه وســیله نیــرو انســانی انجــام میشــود. بــه ایــن منظــور یــک نفـر بـه وسـیله ی ابـزار میـخ خـودکار، هـر قطعـه را پـس از قـرار گرفتـن توسـط ربـات در جـای خـود میـخ کـرده و ثابـت میکنـد. بـا توجـه بـه شـرایط و محدودیـت زمانـی، مـورد دوم ارجحیـت داشـت و مـورد اسـتفاده قـرار گرفـت. بخـش هـای سـاخته شـده در فضـای کارگاه بـه محوطـه دانشـگاه منتقـل شـده و در زمـان حـدود دو سـاعت مونتـاژ شـدند.
مدیریت آزمایشگاه: دکتر علیرضا مستغنی، عضو هیئت علمی دانشگاه هنر
مدیر علمی کارگاه: دکتر محمدرضا متینی، عضو هیئت علمی دانشگاه هنر
دانشجویان:
علی اکبرزاده
علی نخعی
علیرضا محمدی باغبانان
امیر گلی
ارشیا احدی
عاطفه شهرآشوب
آتوسا مومنایی
آوا آقاعلی
بهاره فرحی
بیتا قراقوزلو
دانیال کرامت
فاطمه ایمانی زاده شریف پور
فاطمه قطبی
فاطیما سادات قادری
فروغ سادات کامروافر
حمیدرضا ملکیان
هانیه امید
هما حسن زاده
ایده خاجه وند
کاوه خدابخشی
محمدحسن باقرشاهی
محسن انصاری
محمدسجاد امراللهی بیکلو
نهال دوستی
نوید کاکاوند
نوژان مهدوی
پرستو صمدی
پدرام هاشمی
پوریا احمدی
رهیار قنبری
رعنا فرسادفر
رضا تقوی فر
رومینا اقازیان
صبا صالحی
سپیده صدقی مهر
شادی خالقی
شایان گیوه چی
شقایق تحوری
شیرین شویدی
سینا رشیدی
سودابه شریفی
زهرا صالحی
زهرا خاجه وند
زهرا رهبرین زاده
مدرسین:
مهران مسعودی
فرزانه اسکندری
سیدعلی درازگیسو
رامتین حق نظر